What is a Control System? – ECE
Control System is that means by which any quantity of interest in a machine, mechanism or other equipment is maintained or altered in accordance with a desired manner.
A control system can be defined as the combination of elements arranged in a planned manner wherein each element causes an effect to produce a desired output.
For the automobile driving system, the input (command) signal is the force on the accelerator pedal which through linkages causes the carburettor value to open (close) so as to increase or decrease fuel (liquid form) flow to the engine bring the engine-vehicle speed (controlled variable) to the desired value.
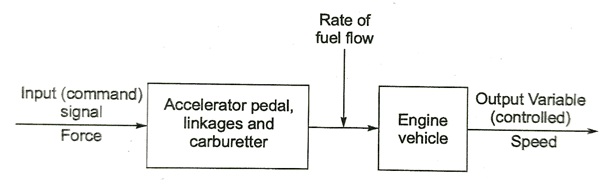
The above figure shows the general diagrammatic representation of a typical control system wherein each block represents an element, a plant, mechanism, devices etc., whose inner details are not indicated. Each block has an input and output signal which are linked by a relationship characterizing the block. It may be noted that the signal flow through the block is unidirectional.
Here are some links to important topics that will help you understand control systems better if you want to study more about it:
Key Concepts:
Classification of Control Systems
Control systems are classified into two general categories as open-loop and closed-loop systems.
Open Loop Systems
An open loop control system is one in which the control action is independent of the output. This is the simplest and most economical type of control system and does not have any feedback arrangement.
Some common examples of open-loop systems are:
- Traffic light controller
- Electric washing machine
- Automatic coffee server
- Bread toaster
Advantages of Open Loop Control Systems
- It is simple in construction and design.
- It costs less time and money to maintain.
- These systems are convenient to use when output is difficult to measure.
Disadvantages of Open Loop Control Systems
- Inaccurate: With no feedback systems, it is very inaccurate.
- Unreliable: It is unreliable as it cannot adapt to uncertainties.
- The effect of parameter variation and external noise is more.
Note: Open loop control systems do not require performance analysis.
Closed Loop Control Systems
A closed loop control system in one in which the control action is somehow dependent on the output. The closed loop system has the same basic features as the open loop system with an additional feedback feature. The actual output is measured and a signal corresponding to this measurement is feedback to the input section, where it is with the input to obtain the desired output. Some common examples of closed loop control systems are:
- Electric iron
- DC motor speed control
- A missile launching system (direction of missile changes with the location of moving target)
- Radar tracking system
- Human respiratory system
- Autopilot system
- Economic inflation
Advantages of Closed Loop Control Systems
- Accurate and reliable
- Reduced effect of parameter variation
- Bandwidth of the system can be increased with negative feedback
- Reduced effect of non-linearities.
Disadvantages of Closed Loop Control Systems
- The system is complex and costly.
- The system may become unstable.
- Gain of the system reduces with negative feedback.
How are control systems used?
Control systems are used in electronics and communication engineering (ECE) to regulate and manage the behavior of electronic devices and communication networks. They are used in a variety of applications, including Aerospace, Industrial automation, Telecommunications, Robotics etc.
Linear and Non-Linear Control System
Linear Systems
A system is called linear if the principle of superposition and principle of homogeneity apply. The principle of superposition states that the response produced by the simultaneous application of two different forcing functions is the sum of the two individual responses. Hence, for the linear system, the response to several inputs can be calculated by transferring one input at a time and adding the results. It is the principle that allows one to build up complicated solutions to the linear differential equations from simple solutions.
In an experimental investigation of a dynamic system, if cause and effect are proportional, thus implying that the principle of superposition holds, then the system can be considered as linear.
Non-linear Systems
A non-linear control system is one that doesn’t adhere to homogeneity. Practically, all real-world control systems are non-linear, although linear ones are theoretically possible. The describing function serves as a method to approximate analysis of these non-linear issues.
A well-known example of a non-linear system is a magnetization curve or no load curve of a DC machine. No load curve gives us the relationship between the air gap flux and the field winding mmf. It is very clear from the curve given below that in the beginning, there is a linear relationship between winding mmf and the air gap flux but after this, saturation has come which shows the nonlinear behavior of the curve or characteristics of the nonlinear control system.
Signal Flow Graphs
The signal flow graph is used to represent the control system graphically and it was developed by S.J. Mason. A signal flow graph is a diagram that represents a set of simultaneous linear algebraic equations. By taking Laplace transform, the time domain differential equations governing a control system can be transferred to a set of algebraic equations in s-domain. The signal flow graph of the system can be constructed using these equations.
It should be noted that the signal flow graph approach and the block diagram approach yield the same information. The advantages in signal flow graph method is that, using Mason’s gain formula the overall gain of the system can be computed easily. This method is simpler than that tedious block diagram reduction technique. The signal flow graph depicts the flow of signals from one point of a system to another and gives the relationships among the signals. A signal flow graph consists of a network in which nodes are connected by directed branches. Each node represents a system variable and each branch connected between two nodes acts as a signal multiplier. Each branch has a gain or transmittance. When the signal passes through a branch, it gets multiplied by the gain of the branch. Note that the signal flows in only one direction. The direction of the signal flow is indicated by an arrow placed by an arrow placed on the branch and the multiplication factor is indicated along the branch.
Online Courses for Control System (EC):
A bachelor’s or master’s degree is very important to pursue a successful career in electrical and communication engineering. But a strong grasp on key topics and subjects is equally important. Particularly, students preparing for government engineering exams may encounter intense competition. So MADE EASY Courses and the experts are here to provide guidance and support during your preparation journey for GATE, ESE, and PSU exams. The courses focus on providing quality lectures from the basic level to the advanced level. MADE EASY provides aspirants with the right guidance to maximize their performance and achieve success. EC engineering candidates are advised to visit the links given below to learn more about courses that include key concepts of engineering branches taught at the basic level and prepare aspirants for the future.
- Classroom Course for GATE 2027-28
- 1 Year Classroom Course for ESE and GATE
- 1 Year Classroom Course for GATE and SES (GS)
- Live Online Course for GATE + SES (GS)
- Live Online Foundation Course for ESE, GATE, and SES 2026
Recommended Books for Control System
Books are still an essential part of learning as they offer in-depth knowledge in various topics. Learning books are well structured and provide comprehensive understanding making them invaluable for students and lifelong learners. MADE EASY Publications is one such platform for students who are looking for high quality and well structured content for their preparation. Our platform consists of government engineering exams books which are curated by a team of experts and experienced authors. Electronics and Communication Engineering aspirants are suggested to click on the links mentioned below to learn more in depth about control systems:
- 📖ESE 2026 Mains Examination: Electronics and Telecom. Engineering Conventional Paper-1
- 📖ESE 2026 Main Exam: Electronics and Telecom. Engineering Paper 2
- 📖ESE 2026: Preliminary Exam: Electronics and Telecom. Engineering Objective Solved Paper
MADE EASY faculty have briefly explained the control systems. Click on the given links to learn more about.
- ▶️How to Score Full Marks in Control System? | Tips & Strategies
- ▶️GATE & ESE Concept Series | Control Systems – Bode Plot
- ▶️GATE & ESE Special | Control Systems
Frequently Asked Questions (FAQs):
1. What is the time response in the control system?
Ans. The time response of a control system means how the response behaves in accordance with time when a specified input test signal is applied to a system.
2. What is the difference between time response analysis and frequency response analysis?
Ans. The time response of a control system means how the response behaves in accordance with time when a specified input test signal is applied to a system.
By the term frequency response, we mean the steady state response of a system to a sinusoidal input. In frequency response methods we vary the frequency of the input signal over a certain range and study the resulting response.
3. What is the signal flow graph?
Ans. The signal flow graph is used to represent the control system graphically and it was developed by S.J. Mason.
4. What is a block diagram?
Ans. A block diagram of a system is a pictorial representation of the functions performed by each component and of the flow of signals.
5. What is a lead compensator?
Ans. It is used for improving the transient state characteristics of the system i.e. improving the speed of the response of the system without altering much of the steady state behaviour. In a compensator system a pair of poles and zero exist. However, if the pole is farther from the imaginary axis than the zero, the phase contribution of the compensator is equivalently positive and thus effective phase lead imposed by the compensator.
Dear Aspirants,
Your preparation for GATE, ESE, PSUs, and AE/JE is now smarter than ever — thanks to the MADE EASY YouTube channel.
This is not just a channel, but a complete strategy for success, where you get toppers strategies, PYQ–GTQ discussions, current affairs updates, and important job-related information, all delivered by the country’s best teachers and industry experts.
If you also want to stay one step ahead in the race to success, subscribe to MADE EASY on YouTube and stay connected with us on social media.
MADE EASY — where preparation happens with confidence.
MADE EASY is a well-organized institute, complete in all aspects, and provides quality guidance for both written and personality tests. MADE EASY has produced top-ranked students in ESE, GATE, and various public sector exams. The publishing team regularly writes exam-related blogs based on conversations with the faculty, helping students prepare effectively for their exams.

