Sudden Change in Mechanical Input
Applications of Equal Area Criterion
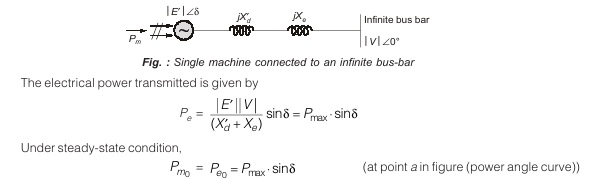
Below figure shows the transient model of a single machine connected to infinite bus bar.
Let the mechanical input to the rotor be suddenly increased to Pm1. Due to the accelerating power Pa = (Pm1-Pe) rotor accelerates and its speed increases (ω > ωs) as a result δ also increases as shown below in figure.
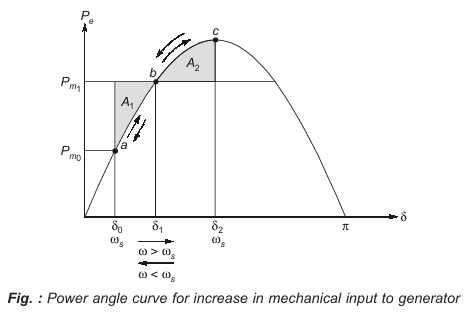
At angle δ1, Pa = (Pm1-Pe) = Pmax Sin δ1 = 0 (at point b), but the rotor angle continues to increase as ω > ωs. Now, Pa becomes negative (decelerating) hence, the rotor speed starts reducing but, the angle continues to increase till at angle δ2, ω = ωs (at point C). At C, the decelerating area A2 equals the accelerating area A1, i.e.,
Since the rotor is deaccelerating, the speed reduces below ωs and the rotor angle begins to reduce. The state point now traverses the Pe – δ curve in opposite direction as shown below in figure (power angle curve). The system oscillates about the new steady-state point b (δ = δ1) with angle upto δ0 and δ2 on the two sides. When the oscillations decay out, the system settles to the new steady state where
Pm1-Pe = Pmax Sin δ1
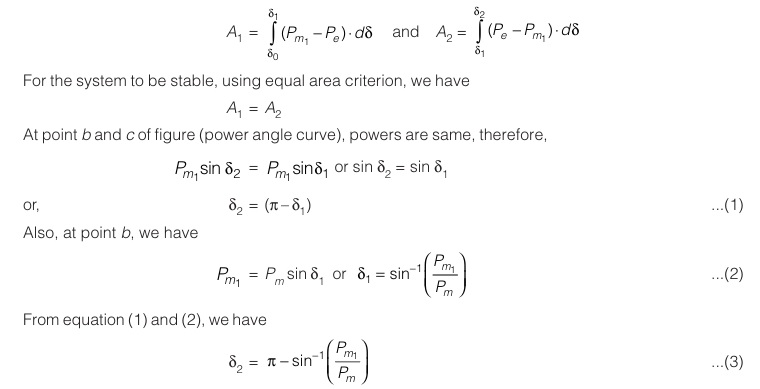
Now, using figure (power angle curve), the two areas are
Now, any further increase in 1 m P means that the area available for A2 is less than A1, so that the excess kinetic energy causes δ to increase beyond point c and the decelerating power changes over to accelerating power and hence, the system becomes unstable. The system will remain stable even though the rotor oscillate beyond δ = 90°, as long as the equal area criterion is met. The oscillations for δ = 90° is shown below in figure which is a stable system as A2 (decelerating area) is greater than A1 (accelerating area).

Note:
- For the transient stability of a synchronous generator connected to an infinite bus, the decelerating area must be greater than accelerating area. (For figure (power angle curve), A1 is accelerating and A2 is decelerating area).
- For the transient stability of a synchronous motor connected to an infinite bus, the decelerating area must be less than the accelerating area. (For motor in figure (power angle curve) and figure (transient stability with sudden increase), A1 will be decelerating area while A2 will be accelerating area).
- More the decelerating area, more the system stable (for generator action).
<< Previous | Next >>
Must Read: What is Power Generation?
Dear Aspirants,
Your preparation for GATE, ESE, PSUs, and AE/JE is now smarter than ever — thanks to the MADE EASY YouTube channel.
This is not just a channel, but a complete strategy for success, where you get toppers strategies, PYQ–GTQ discussions, current affairs updates, and important job-related information, all delivered by the country’s best teachers and industry experts.
If you also want to stay one step ahead in the race to success, subscribe to MADE EASY on YouTube and stay connected with us on social media.
MADE EASY — where preparation happens with confidence.
MADE EASY is a well-organized institute, complete in all aspects, and provides quality guidance for both written and personality tests. MADE EASY has produced top-ranked students in ESE, GATE, and various public sector exams. The publishing team regularly writes exam-related blogs based on conversations with the faculty, helping students prepare effectively for their exams.
